| 【Unity】判断物体(四边形)是否在相机的可视范围内 | 您所在的位置:网站首页 › unity 物体是否显示 › 【Unity】判断物体(四边形)是否在相机的可视范围内 |
【Unity】判断物体(四边形)是否在相机的可视范围内
|
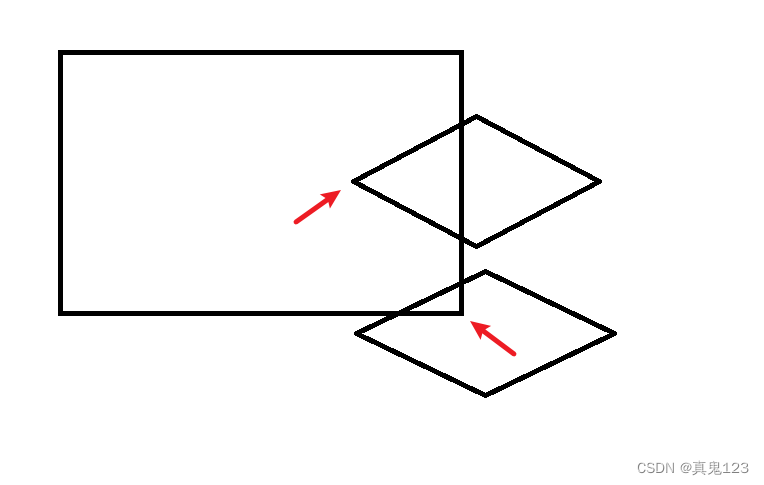
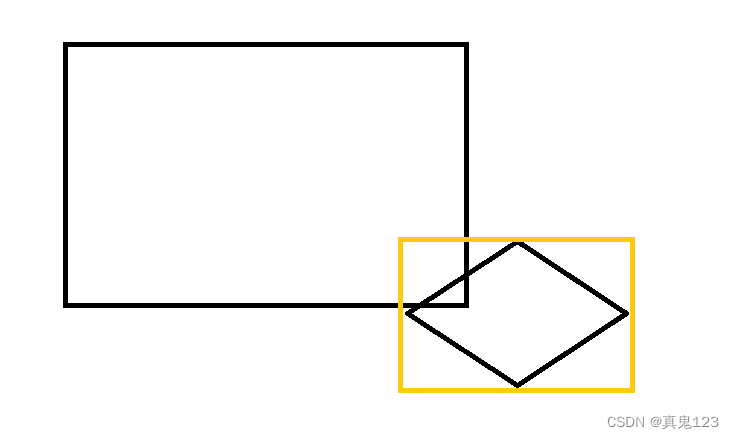
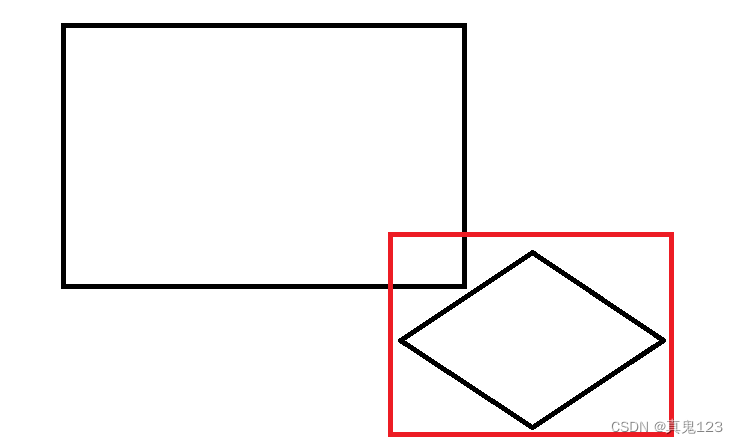
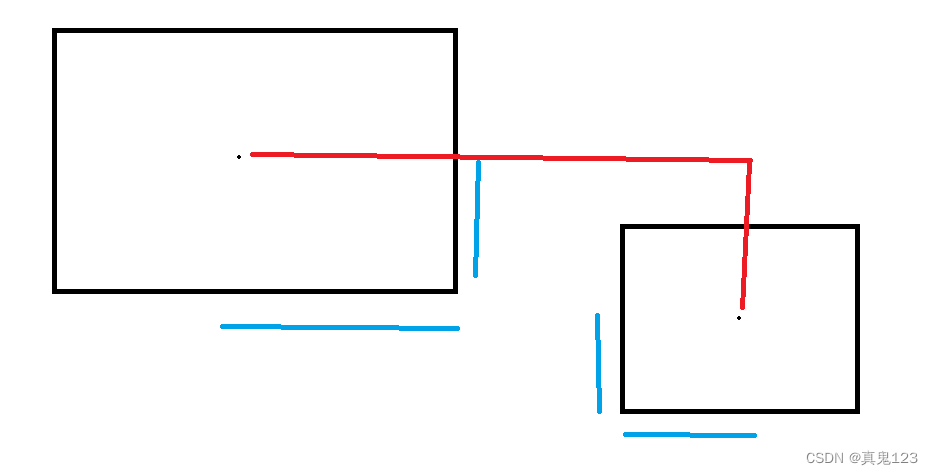
MonoBehaviour.OnBecameVisible() 在渲染器变为对任意摄像机可见时调用。 MonoBehaviour.OnBecameInvisible()在渲染器对任何摄像机都不可见时调用。 public class ExampleClass : MonoBehaviour { void OnBecameInvisible() { enabled = false; } void OnBecameVisible() { enabled = true; } }优点:可以很方便的得到物体对于相机可见和不可见的调用。 缺点:这个调用是不可控的,无法主动触发结果,而且OnBecameVisible只在物体进入相机可视范围内时触发一次,同样的OnBecameVisible只在物体退出相机可视范围内时触发一次。 自定义方法下面的运算,都将坐标转换为屏幕坐标来运算。 相机可视范围的矩形为(0,0)(0,1)(1,0)(1,1) 为了方便说明,将相机可视范围的矩形称为矩形A,将需要计算的面称为平面B。 条件1:如果则平面B的某一个顶点在矩形A中,则平面B和矩形A一定相交。 条件2:如果则矩形A的某一个顶点在平面B中,则平面B和矩形A一定相交。 因为判断点是否在矩形内的算法耗时很少,所以我们直接使用。 private bool IsPosListInRectangle(Vector2[] posList, Vector2 leftDown, Vector2 rightTop) { foreach (var pos in posList) { if (pos.x >= leftDown.x & pos.x = leftDown.y & pos.y < rightTop.y) { return true; } } return false; }传入平面B的四点数组,和矩形A的左下角点,和右上角点。 如果结果为true,平面B和矩形A一定相交。 如果结果为false,平面b的所有顶点一定不再矩形A内。 2.修改条件2,得到一定不相交的情况。因为判断点在矩形的算法很简单,耗时很少,所以在1中我们直接使用了。 但条件2是要判断点在四边形中。 所以我们计算四边形的外包围矩形,使用四顶点中最小的x,y和最大的x,y即可。 改为判断矩形B的四个顶点,是否在平面A的外包围矩形中。 但如果是这种情况,矩形B右下角顶点,在平面B外包围矩形内,两平面不相交。 所以我们反过来,判断矩形B和平面A的外包围矩形是否相交,得到一定不相交的情况 两个矩形如果不相交,那么矩形B和平面A也一定不相交。 参考:两矩形相交的判定https://blog.csdn.net/qq_41220023/article/details/79748493 直接判定两个矩形的中心距离,然后判断其是否皆小于两矩形长的和的一半 和 宽的和的一半. 如果中心距离的x,小于量矩形长度和的一半,并且中心距离的y,小于量矩形长度和的一半,则两矩形一定相交。 |
【本文地址】